
محققان موسسه سیستمهای هوشمند ماکس پلانک (MPI-IS) در آلمان، یک سگ ربات چهار پا ساختهاند که میتواند راه رفتن را در یک ساعت یاد بگیرد. ربات مورتی مجهز به نخاع مصنوعی است که به طور مداوم بهینه می شود. محققان در تلاش بودند تا بررسی کنند که چگونه انسان ها راه رفتن را از روی زمین خوردن یاد می گیرند. هنگامی که یک نوزاد حیوانی به دنیا می آید، یک شبکه هماهنگی عضلانی در طناب نخاعی دارد، اما هنوز زمان لازم است تا نوزادان تازه متولد شده روی پاهای خود تعادل برقرار کنند و راه رفتن را یاد بگیرند.
در روزهای ابتدایی پس از تولد، نوزادان برای یادگیری راه رفتن به رفلکسهای نخاعی متصل میشوند. در مرحله یادگیری، رفلکس های کنترل حرکتی کودک را از افتادن و آسیب دیدگی نجات می دهد. سپس حیوان باید کنترل ماهیچهای پیشرفته و دقیق را تا زمانی که سیستم عصبی با عضلات و تاندونهای پای حیوان سازگار شود، تمرین کند.
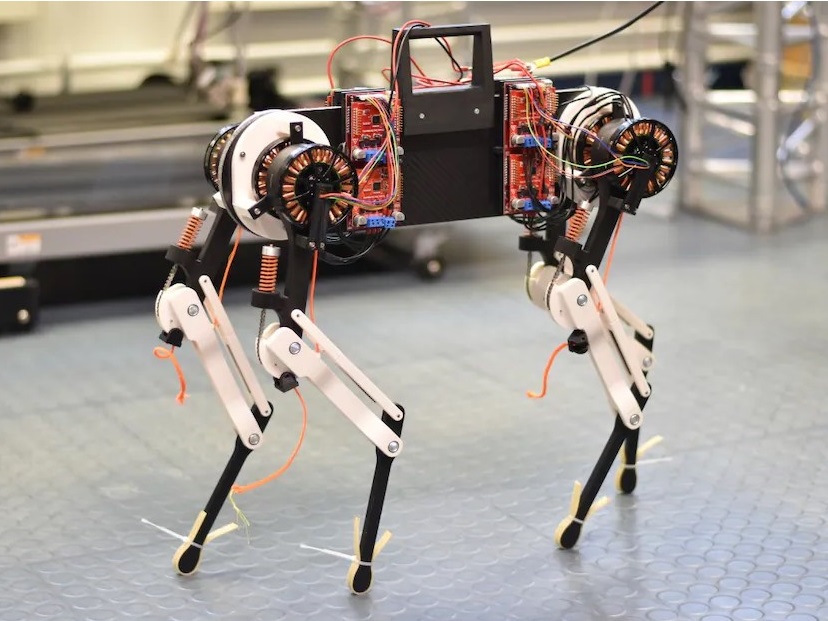
برای درک این فرآیند، دانشمندان یک ربات چهار پا به اندازه یک سگ به نام مورتی ساختند. ما بهعنوان مهندس و متخصص رباتیک، با ساختن رباتی که دارای رفلکسهایی باشد و از اشتباهات درس میگیرد، به دنبال پاسخ بودیم. اگر حیوانی زمین بخورد، آیا این اشتباه است؟ نه اگر یک بار اتفاق بیفتد.
این سگ ربات از الگوریتم بهینه سازی بیزی برای هدایت یادگیری خود استفاده می کند. اطلاعات اندازهگیری شده از حسگر پا با دادههای هدف از نخاع مجازی مدلسازیشده، که بهعنوان یک برنامه در سگ اجرا میشود، مطابقت دارد. این سگ ربات اطلاعات سنسور ارسالی و مورد انتظار را با هم مقایسه می کرد، حلقه های بازتابی را اجرا می کرد و الگوهای کنترل موتور خود را تطبیق می داد.
الگوریتم یادگیری با پارامترهای کنترلی یک مولد الگوی مرکزی (CPG) سازگار است. هنگامی که حیوانی تلو تلو می خورد، راه رفتن او تغییر می کند و رفلکس ها برای نجات حیوانات از سقوط درگیر می شوند. در مورتی، الگوهای حرکتی سریعتر از یک حیوان بهینه می شوند. سگ یک نخاع مجازی به پشتش متصل است در حالی که CPG روی کامپیوتر شبیه سازی می شود.
زمانی که ربات در شرف سقوط است، الگوریتم داده های مربوط به حرکت پاها را ثبت می کند و حرکت را تنظیم می کند. سپس حرکت تنظیم شده برای ربات ارسال می شود تا با بهینه سازی راه رفتن، کمتر دچار لغزش شود.


{kind=link}